Warehouse Simulation:
Python Project
Implementing a frontier-based exploration and a marker collection stage with a callibrated PID controller
Warehouse Simulation Frontier Exploration:
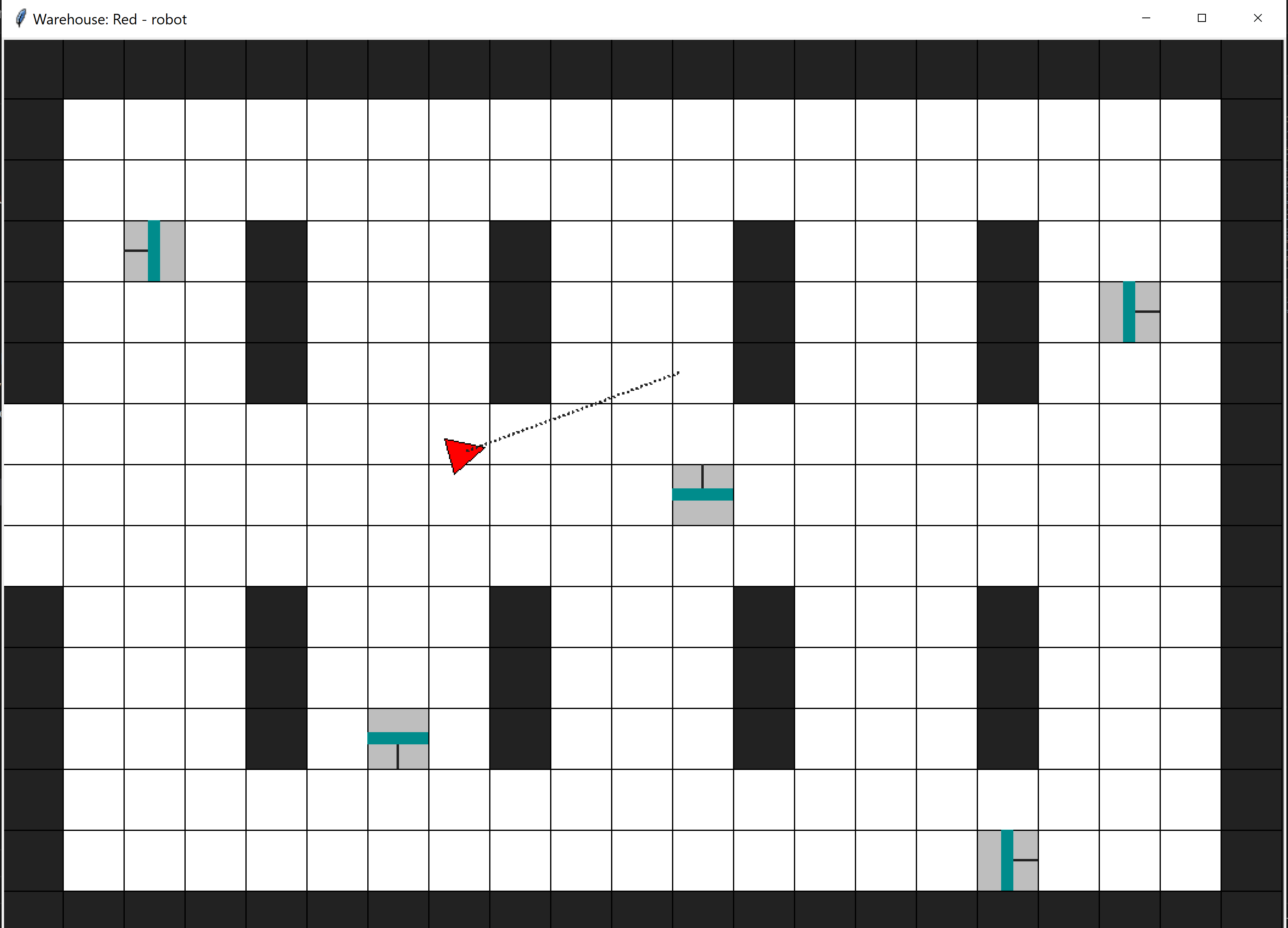
This project was split into 2 parts. The first was a frontier-based
exploration process where the robot tries to explore its suroundings to find markers. In real life,
the markers would have been packages. The robot uses RRT and a frontier calculation to explore unexplored cells
until all of the markers have been found
Warehouse Simulation Marker Collection:
In the second part of the project, the robot has full knowledge of the markers from the previous part. To collect a marker, the robot travels to the marker and needs to have a specific orientation in order to be able to pick up the marker. The algorithm takes the closest marker and utilizes RRT to path plan around obstacles and collect markers. It iterates through the markers until all markers are collected.
Skills
- Python
- Frontier-planning
- Path Planning
- RRT