RRT Planning Simulation
Designing a node generator to navigate a robot through a series of obstacles in real time with RRT. Path smoothing was also made to reduce the number of nodes between the start node and the end node.
RRT Research Overview
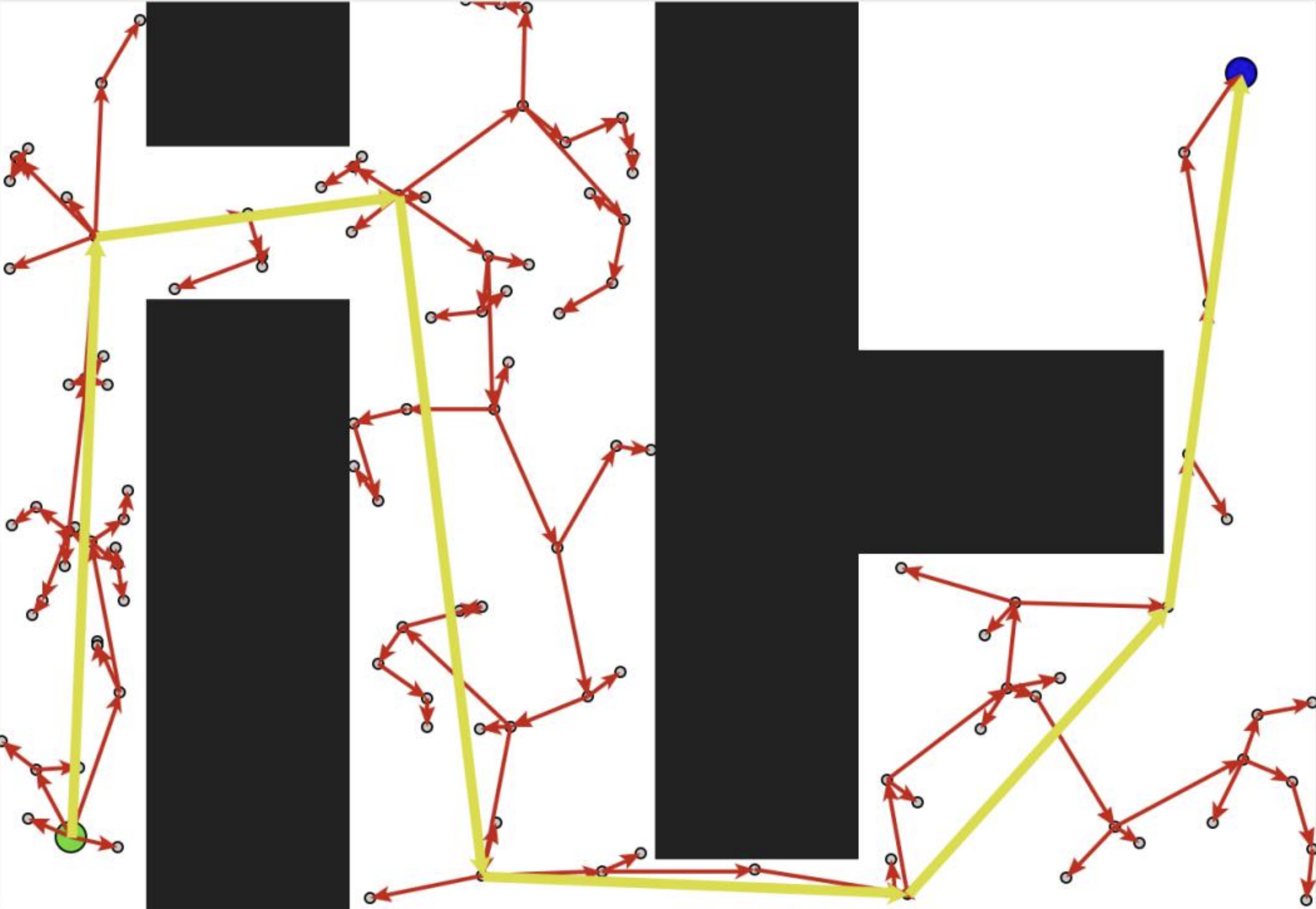
Creating a node generator in order to research how created randomly generated nodes can create a path for a robot to navigate
around obstacles and walls. Essentially, RRT was created to help a robot of length 0.5m in order to navigate a course from start to end.
Improving the model
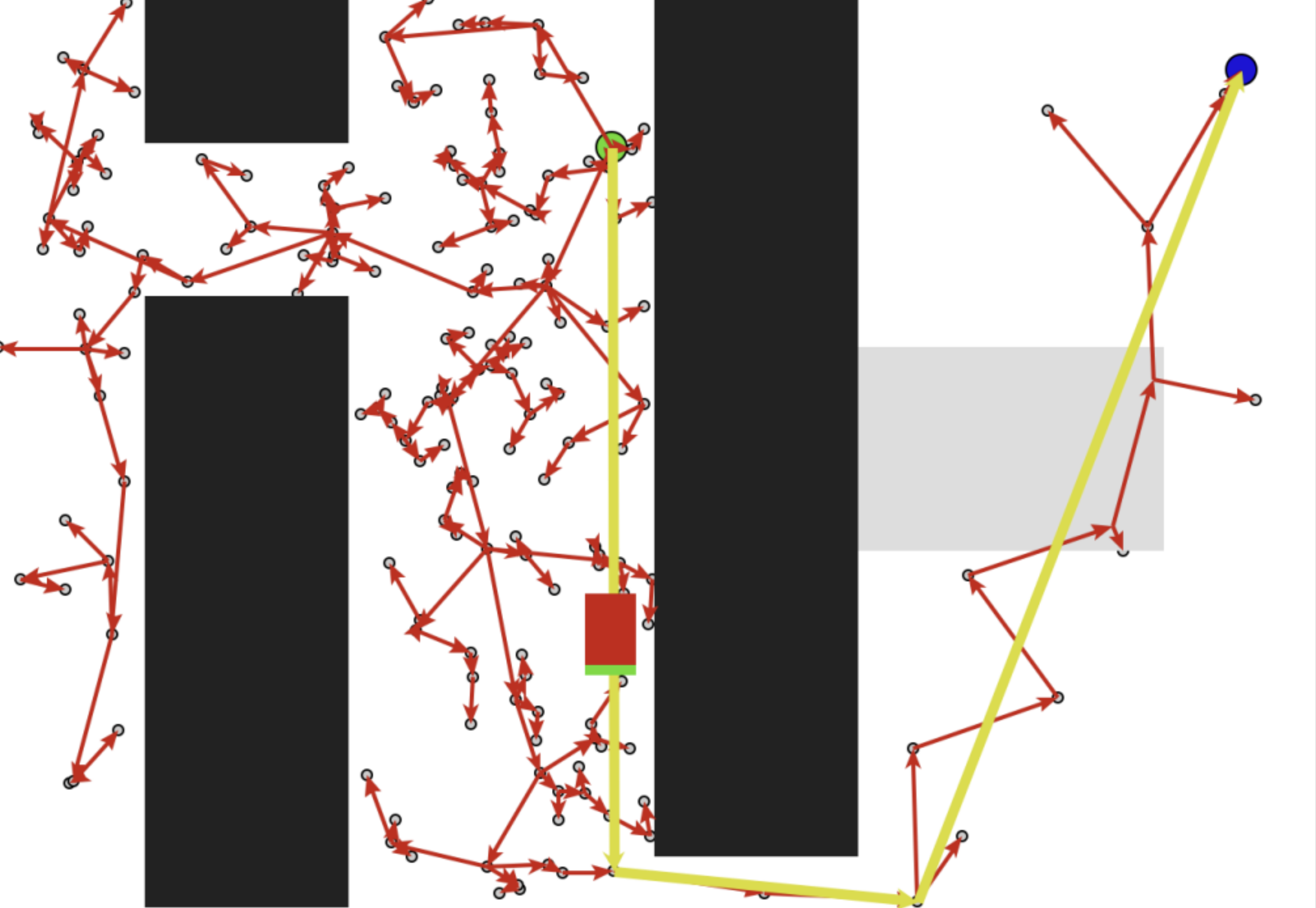
To improve the model, path smoothing was created, which is a way for the algorithm to reduce the number of nodes on the path.
It removes complexity and created a quicker path for the robot to get from start to finish. I researched an algorithm that takes spaced nodes that have few children,
representing an area with few obstacles. It tries to connect distant nodes that do not collide with an obstacle, and the process repeats while also testing the more
dense nodes with nodes that are not as far apart to see if more nodes can be connected.
- Python
- RRT
- Path Planning