PID Controller Research
Tuning a linear and angular PID controller that is suitable for a robot driving along a thin icy path. I looked into certain parameters and stopping algorithms to prevent a robot from sliding off the icy road.
PID Research Overview
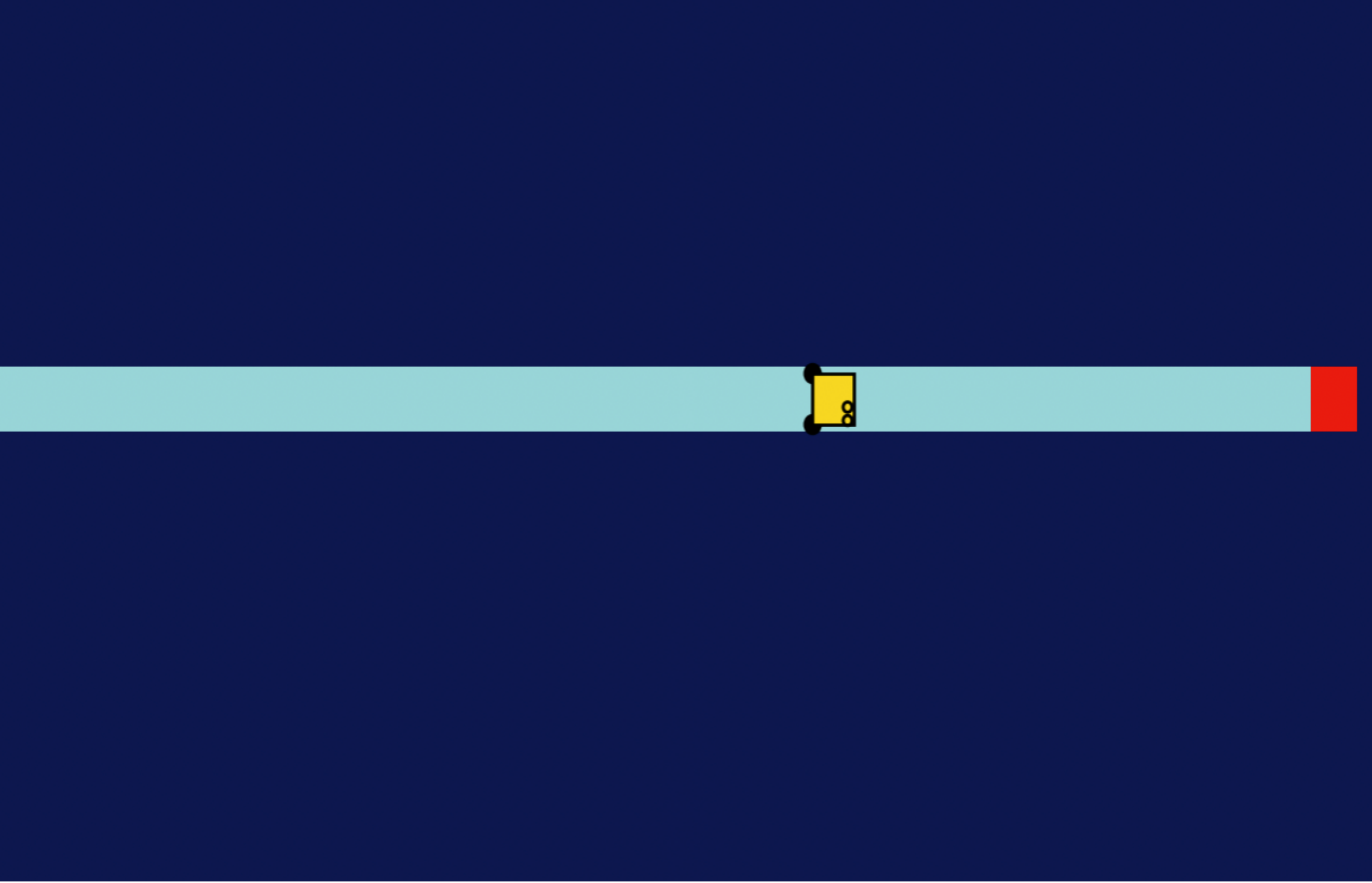
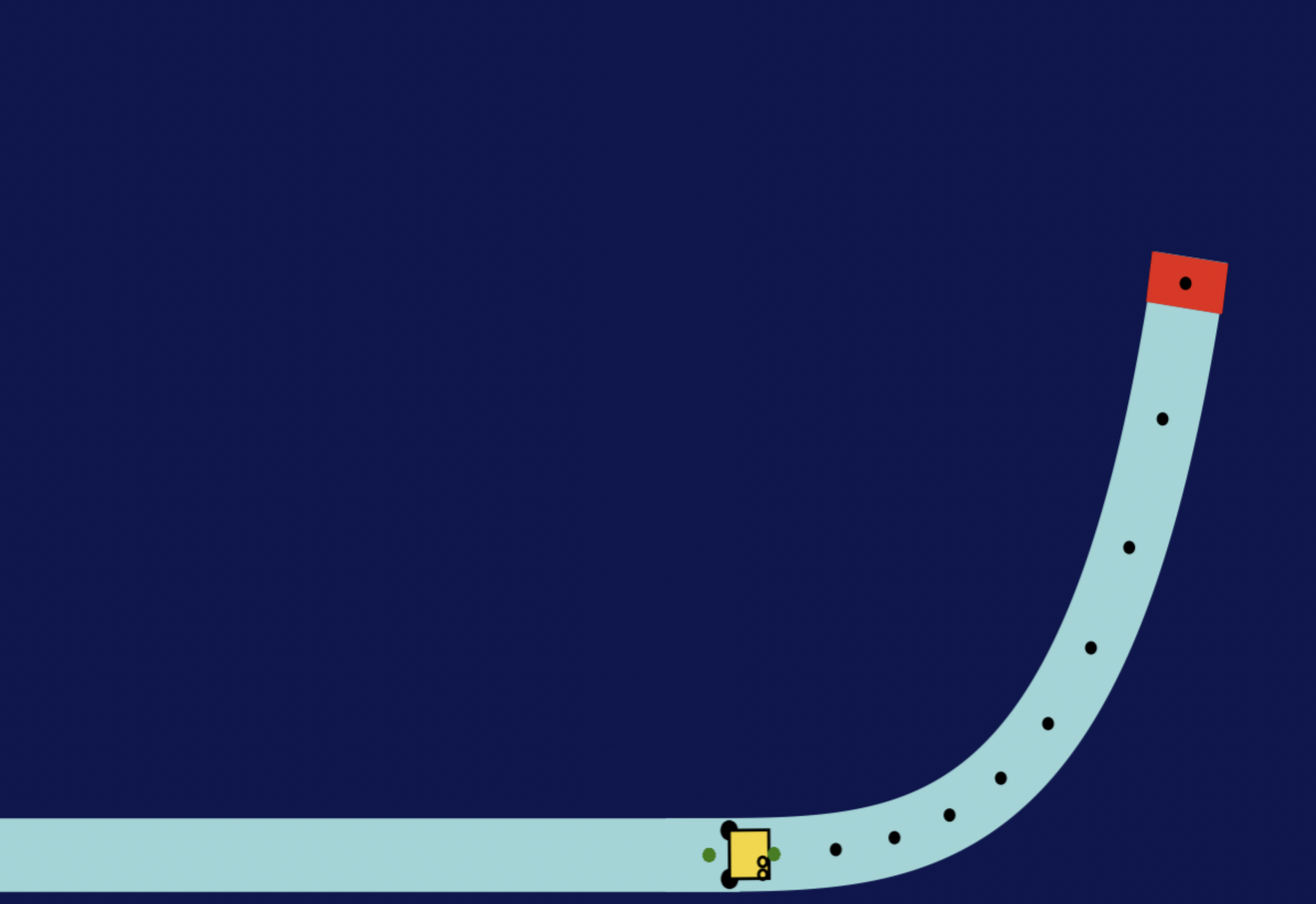
On top of learning the ins and outs of PID, I applied it to a unique scneario where a robot will slide on an icy road
despite having non-moving wheels. I researched a way of fine-tuning the way the robot stops by accounting for the distance it is from a target and
then reversing the wheel inputs while accounting for random noise until it comes to a complete stop. There are also scenarios created where a strong wind
impacts the robot and the PID control counteracts it.
- Python
- PID