Particle Filter Research
Takes a robot odometry measurement as a motion control input and a marker measurement as a sensor input. Took 5000 particles as the filter to try and find the global optimal estimation.
Particle Filter Details
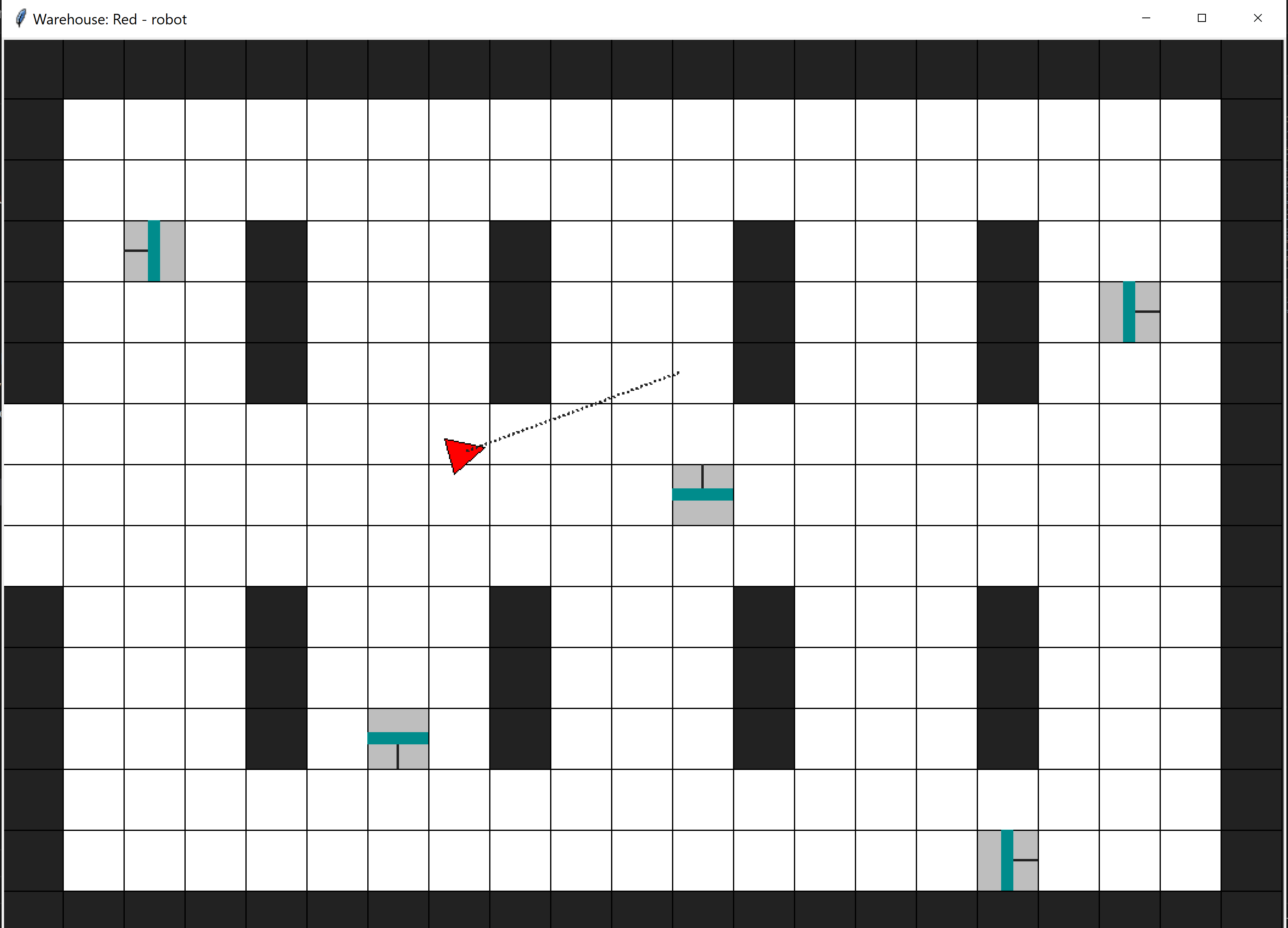
This project mainly looks into the world of particle filters and trying to match a set of randomly generated particles to the
robot odometry and its movement as well. The particle's estimated value is its determined location of where the robot is and that is represented
by the green triangle. The red triangle is the robot and the dotted lines are its field of view. The little red and black lines are the markers,
and they are in the stage of matching the robot better as the green triangle is pretty close to the red triangle.